Soft Pneumatic Interfaces
A pipeline to design and fabricate soft sensors for safer human-machine interactions



We created a design and fabrication process for soft sensors that enables more engaging physical, embodied interactions with technology. This platform makes resilient air bubbles that can be used as sensors to detect a persons touch. We can outfit robots with them to make them safer to interact and collaborate with people, or add them to existing hardware to allow for new ways of playing with a device. Not only can they act as sensory input but they can also be actuated with a compressor, as in this HCI paper that used our machine, which opens up another world of applications.
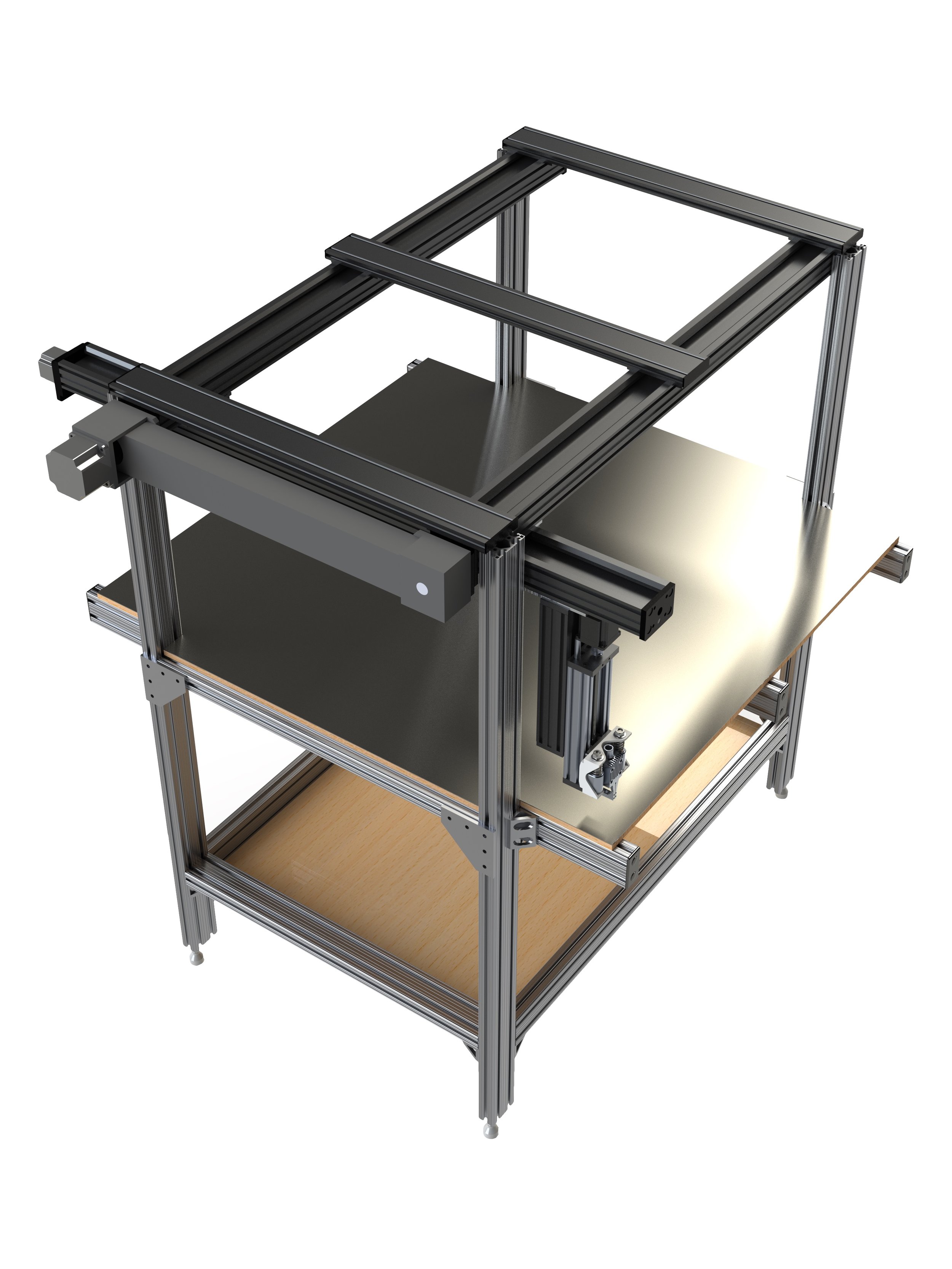
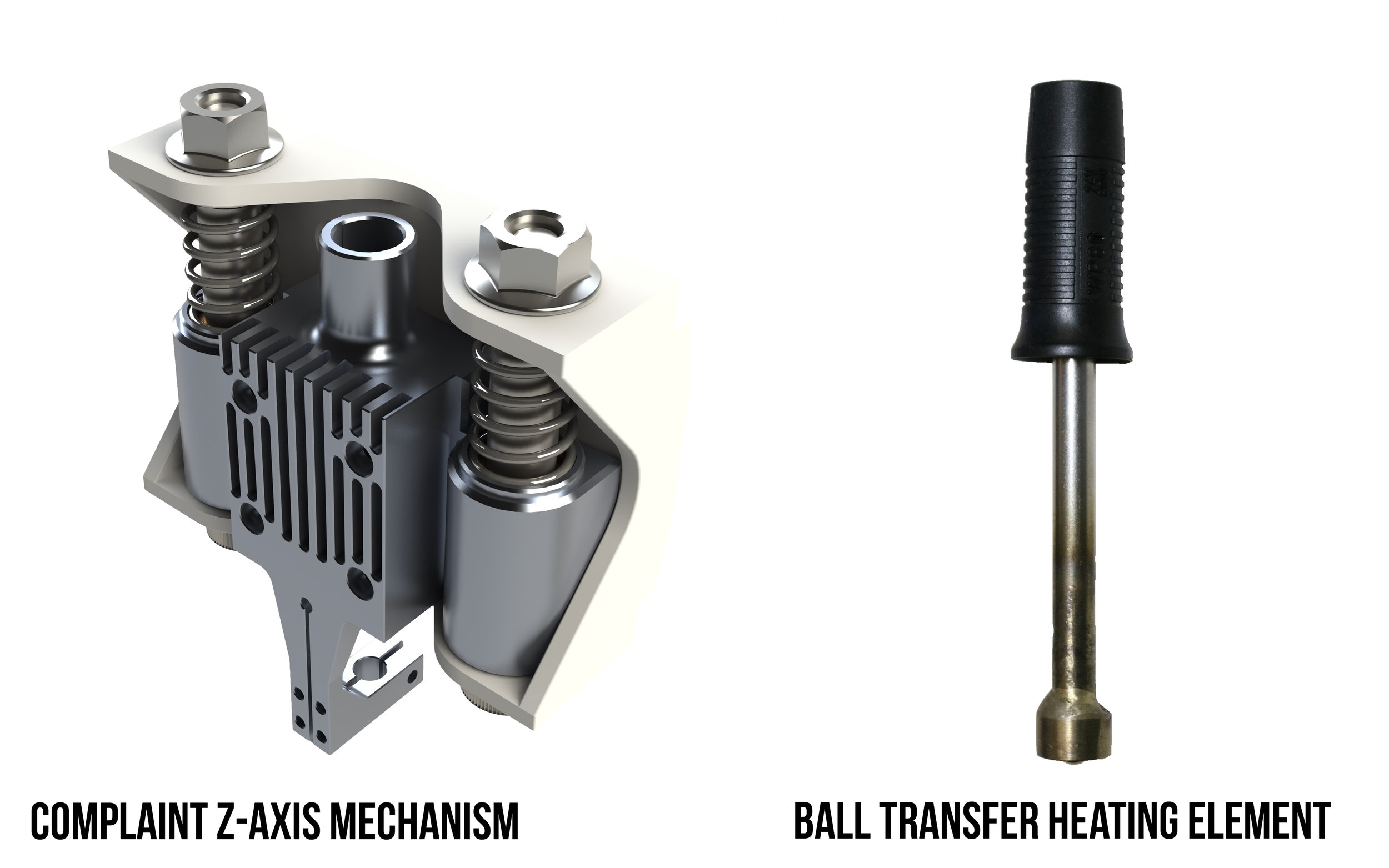
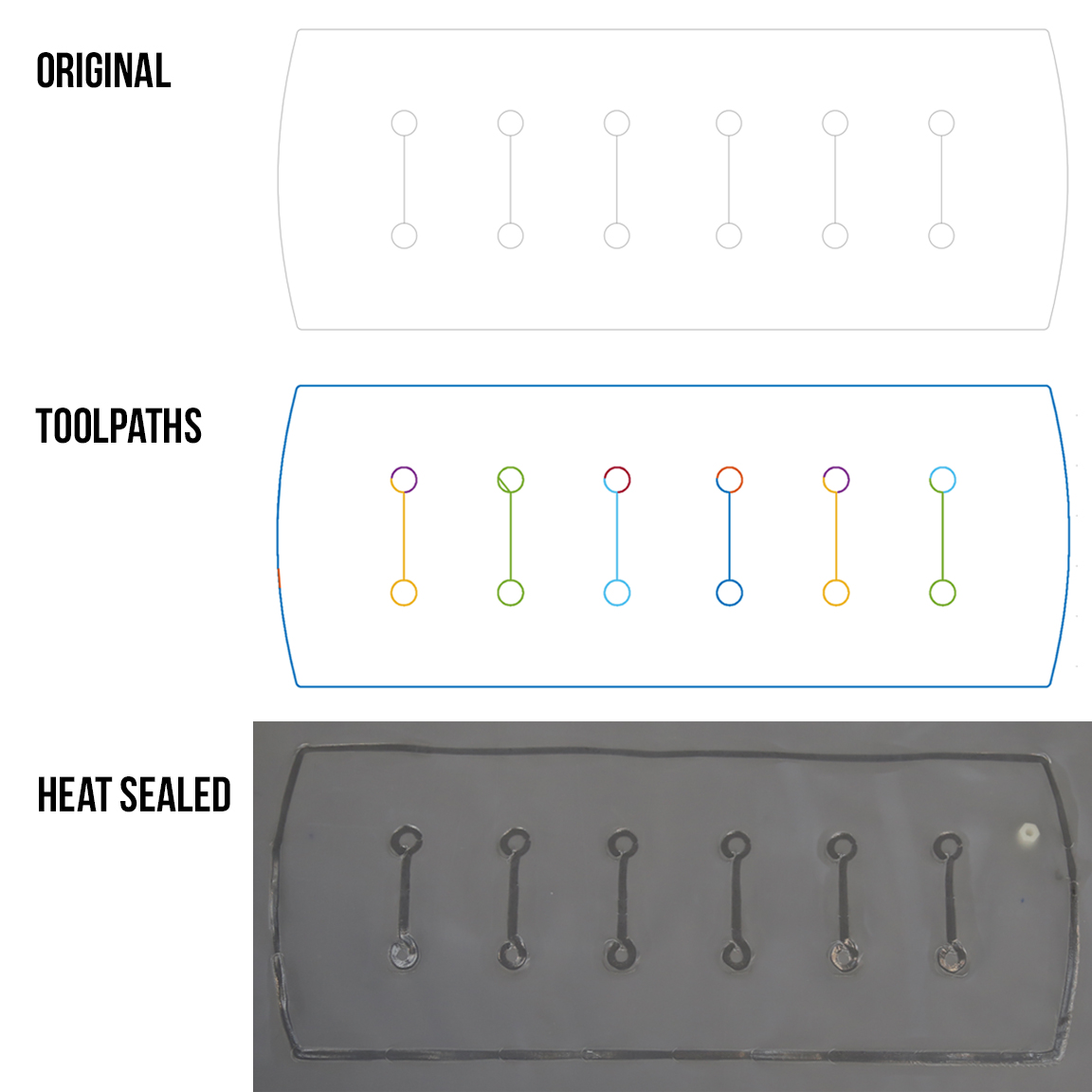
The software takes in black and white line drawings then breaks down the design into tool paths for the custom heating element to trace onto polyurethane sheets. We altered a soldering iron so that it can be outfitted with ball transfer that heats up, presses down onto the sheets of polyurethane and smoothly rolls over. The heat fuses the layers of polyurethane to create an air-tight seal. We made custom valves that provide an airtight seal and can connect to a pressure sensor to measure the internal pressure of the bubble. One of the applications we explored was using these bubbles on a robot to detect physical interaction with a person. For a more technical breakdown of the project please refer to the research paper[PDF] [IEEE] and video below.
This work was presented at the Robosoft 2019 Conference in Korea.